BetaFlight模块设计之三十二:MSP协议模块分析
基于BetaFlight开源代码框架简介的框架设计,逐步分析内部模块功能设计。
1. MSP协议模块
1.1 MSP描述
MSP是Multiwii Serial Protocol的缩写,截止目前为止有两个版本V1和V2。它是一个远程消息协议,主要用在iNav、MultiWii、 CleanFlight、BetaFlight的飞控上。
MSP协议定义了request-response protocol通信机制。发起request一方被认为是"MSP Master",反馈response的一方被认为是"MSP Slave"。
1.2 MSP版本优缺点
鉴于V1版本在使用过程发现如下问题:
ID支持最大255个,在飞控的发展过程,已经基本用尽。
消息体最多只有255字节的Payload,对于巨帧(JUMBO frame)来说也是一个限制。
checksum(XOR checksum)不够健壮,不能很好的检测通信错误。
在此基础上V2版本做了如下调整:
16bit IDs, 兼容IDs 0-255(MSP V1)。
16bit Payload,扩展了一帧字节数。
checksum(crc8_dvb_s2),相较于XOR算法更加健壮和稳定。
1.3 MSP代码资源
src/main/msp/ ├── msp_box.c ├── msp_box.h ├── msp.c ├── msp.h ├── msp_protocol.h ├── msp_protocol_v2_betaflight.h ├── msp_protocol_v2_common.h ├── msp_serial.c └── msp_serial.h 0 directories, 9 files
2. MSP报文解析
通过阅读mspSerialProcessReceivedData代码,我们可以得到报文格式:
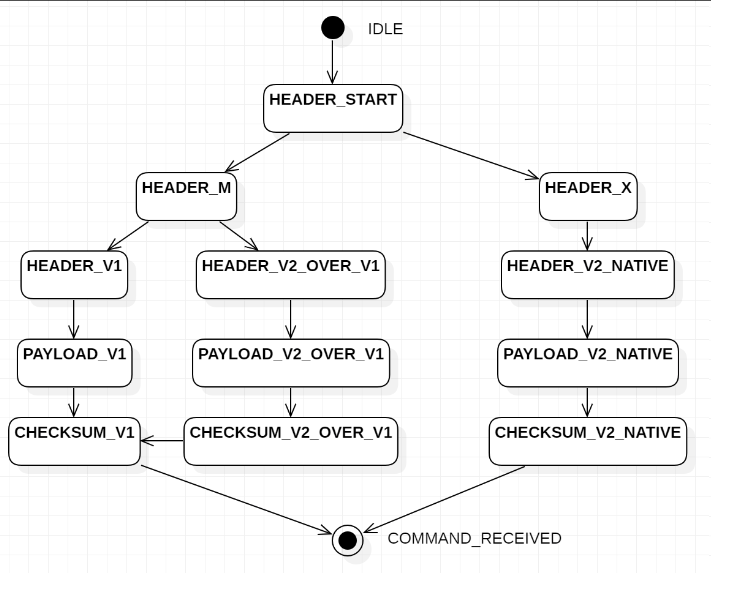
2.1 MSP收包状态机
注:收包状态机,任何一个状态出错回到IDLE(初始态)。
MSP报文收包状态机
2.2 MSP报文格式
+---+---+--------+---------+--------+-------------------------------------------------------------+-------------+ | Multiwii Serial Protocol V1 length = 6 + payload size | +---+---+--------+---------+--------+-------------------------------------------------------------+-------------+ | $ | M | < or > | size(1) | cmd(1) | payload(0-255) | checksum_v1 | +---+---+--------+---------+--------+-------------------------------------------------------------+-------------+ +---+---+--------+---------+--------+------+---------+---------+--------------------+-------------+-------------+ | Multiwii Serial Protocol V2 over V1 length = 12 + payload size | +---+---+--------+---------+--------+------+---------+---------+--------------------+-------------+-------------+ | $ | M | < or > | size(1) | 255 | flag | cmd(2) | size(2) | payload(16bit len) | checksum_v2 | checksum_v1 | +---+---+--------+---------+--------+------+---------+---------+--------------------+-------------+-------------+ +---+---+--------+---------+--------+------+---------+------------------------------+-------------+ | Multiwii Serial Protocol V2 length = 9 + payload size | +---+---+--------+---------+--------+------+---------+------------------------------+-------------+ | $ | X | < or > | flag(1) | cmd(2) | size(2) | payload(16bit len) | checksum_v2 | +---+---+--------+---------+--------+------+---------+------------------------------+-------------+
‘$’:表示SOF(Start Of a frame)
‘M’:表示V1 or V2 over V1
‘X’:表示V2
‘<’: 表示request
‘>’:表示response
typedef struct __attribute__((packed)) {
uint8_t size;
uint8_t cmd;
} mspHeaderV1_t;
typedef struct __attribute__((packed)) {
uint8_t flags;
uint16_t cmd;
uint16_t size;
} mspHeaderV2_t;3. MSP报文处理
3.1 MSP请求报文处理(mspSerialProcessReceivedCommand)
mspFcProcessCommand ├──> MSP_RESULT_ACK, mspCommonProcessOutCommand ├──> MSP_RESULT_ACK, mspProcessOutCommand ├──> ret = mspFcProcessOutCommandWithArg ├──> MSP_RESULT_ACK, mspFcSetPassthroughCommand //cmdMSP == MSP_SET_PASSTHROUGH ├──> MSP_RESULT_ACK, mspFcDataFlashReadCommand //cmdMSP == MSP_DATAFLASH_READ ├──> ret = mspCommonProcessInCommand └──> reply->result = ret;
以上函数是针对MSP协议进行实际ID对应的报文进行处理过程。具体报文ID,请参阅:
msp_protocol.h
msp_protocol_v2_common.h
msp_protocol_v2_betaflight.h
3.2 MSP反馈报文处理(mspSerialProcessReceivedReply)
仔细分析了下代码,貌似没有太多用处(至少在Kakute F7上)。
mspFcProcessReply
void mspFcProcessReply(mspPacket_t *reply)
{
sbuf_t *src = &reply->buf;
UNUSED(src); // potentially unused depending on compile options.
switch (reply->cmd) {
case MSP_ANALOG:
{
uint8_t batteryVoltage = sbufReadU8(src);
uint16_t mAhDrawn = sbufReadU16(src);
uint16_t rssi = sbufReadU16(src);
uint16_t amperage = sbufReadU16(src);
UNUSED(rssi);
UNUSED(batteryVoltage);
UNUSED(amperage);
UNUSED(mAhDrawn);
#ifdef USE_MSP_CURRENT_METER
currentMeterMSPSet(amperage, mAhDrawn);
#endif
}
break;
}
}不过有部分机型还是有这方面的需求的,但是不清楚飞控是从哪里读取电流和毫安时。
./src/main/target/SPRACINGF4EVO/target.h:183:#define USE_MSP_CURRENT_METER ./src/main/target/SPRACINGF3EVO/target.h:157:#define USE_MSP_CURRENT_METER ./src/main/target/SPRACINGF7DUAL/target.h:181:#define USE_MSP_CURRENT_METER ./src/main/target/SPRACINGF3/target.h:189:#define USE_MSP_CURRENT_METER ./src/main/target/NUCLEOF303RE/target.h:137:#define USE_MSP_CURRENT_METER
4. 参考资料
【1】iNavFlight之MSP DJI协议分析
【2】iNavFlight之MSP DJI协议天空端请求报文
【3】iNavFlight之MSP DJI协议飞控端请求应答
【4】通过无线自制串口模块连接SpeedyBee或BetaFlightConfigurator
【5】Multiwii Serial Protocol
【6】Multiwii Serial Protocol (MSP)
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/lida2003/article/details/125260025
本文系转载,版权归原作者所有,如若侵权请联系我们进行删除!
云掣基于多年在运维领域的丰富时间经验,编写了《云运维服务白皮书》,欢迎大家互相交流学习:
《云运维服务白皮书》下载地址:https://fs80.cn/v2kbbq
想了解更多大数据运维托管服务、数据库运维托管服务、应用系统运维托管服务的的客户,欢迎点击云掣官网沟通咨询:https://yunche.pro/?t=shequ